
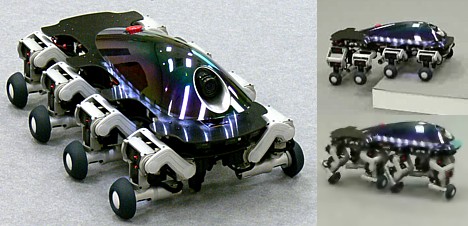
On June 25, researchers at the Chiba Institute of Technology unveiled a working prototype of the Halluc II, a robotic vehicle with eight wheels and legs designed to drive or walk over rugged terrain. The agile robot, which the developers aim to put into practical use within the next five years, can move sideways, turn around in place and drive or walk over a wide range of obstacles. The researchers hope the robot's abilities will help out with rescue operations, and they would like to see Halluc II's technology put to use in transportation for the mobility-impaired.
The operator can put Halluc II into one of three modes depending on the terrain -- Vehicle, Insect or Animal mode. In Vehicle mode, Halluc II drives around on its eight wheels, and as it moves over uneven surfaces, each of the legs moves up and down in sync with the terrain to provide a smooth ride that keeps the cab at a constant height. In Insect mode, Halluc II does not use the wheels; instead, it walks with an insect-like gait, with its legs extended outward from the cab. In Animal mode, Halluc II keeps its legs directly beneath the cab while it walks, allowing it to pass through tight spaces. With wireless LAN capabilities and a system of cameras and sensors that monitor the distance to potential obstacles, Halluc II constantly assesses how best to adjust the position of its legs and wheels.
Here's a short video of the model in action.
Halluc II's design calls for a total of 56 motors -- 2 for each leg joint (3 joints per leg), plus 1 for each wheel. Equipping each joint with 2 motors provides the legs with abundant power and allows for a smoother ride, say the researchers, who have devoted a great deal of attention to the cutting-edge multi-motor control system, a key component of Halluc II's design.
According to Mr. Yoshida, chief researcher at Chiba Institute of Technology's Future Robotics Technology Center (fuRo), the expensive price tag of high-precision motors poses some challenges, but as costs come down in the future, it will become easier to incorporate greater numbers of motors into drive systems. Halluc II appears to be a more advanced version of fuRo's 8-wheeled Hallucigenia01 robot created in 2003.
In designing Halluc II, the researchers have enlisted the help of renowned industrial designer Shunji Yamanaka, who has worked on everything from furniture and watches to robots and transportation. "Human beings have a large number of muscles, which allows for a great degree of freedom," says Yamanaka. "By incorporating greater redundancy into the vehicle's functions, we can give it more flexibility and speed and enable it to continue operating even when obstacles are in the way."
The Halluc II prototype is scheduled to go on display at Miraikan in Tokyo beginning August 1. At the exhibit, visitors will be allowed to operate the vehicle from a remote-control cockpit with a large screen showing real-time video shot from the onboard camera.
[Source: Nikkei BP]
UPDATE: Robot Watch also has a lot of great photos and videos. Here's a clip showing Halluc II in Insect mode and Animal mode. I can't wait to drive one through rush-hour traffic.
david
ghost in the shell?
[]Saniko
Here's a similar robot:
http://www.youtube.com/watch?v=NxdtkopQOlM (from about 1:26 to 2:14)
Pretty soon Japan will be building actual Tachikomas! :O
[]rajendra . m
technically super
[]please provide more design details like no. of motors,axis,power source etc....
chelsea
cool but bogus
[]andrew
When will we be able to buy one?
[]